
ROS实践系列01-基础环境配置

安装VMware Workstation
VMware Workstation 是由 VMware 公司开发的一款桌面虚拟化软件(也称为托管型 Hypervisor),允许用户在单一物理计算机上同时运行多个操作系统,例如 Windows、Linux 和 BSD 等,作为虚拟机(VM)运行在宿主操作系统之上。截至 2025 年, VMware Workstation 所属的公司是 Broadcom Inc. (博通公司)。Broadcom 于 2023 年 11 月 正式完成对 VMware 的收购 。自此,VMware 成为其旗下虚拟化业务的一部分。
值得注意的是,在 Broadcom 收购 VMware 之后, VMware Workstation Pro 自 2024 年 5 月起已转为免费提供 ,不再收取许可费用,适用于个人和商业用途 。
但是基于国内网络的特殊性,以及博通网站的复杂性,我已做了新版的备份。
安装过程
双击打开 VMware-workstation-full-17.6.4-24832109.exe 安装包
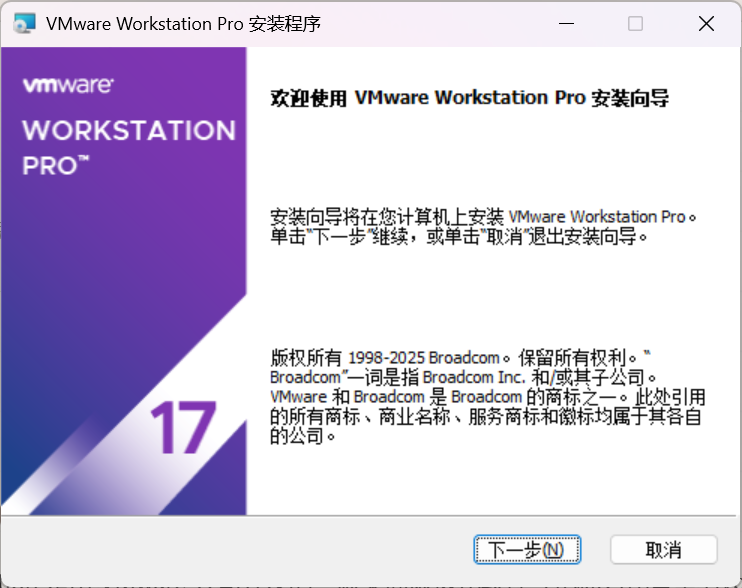
点击下一步
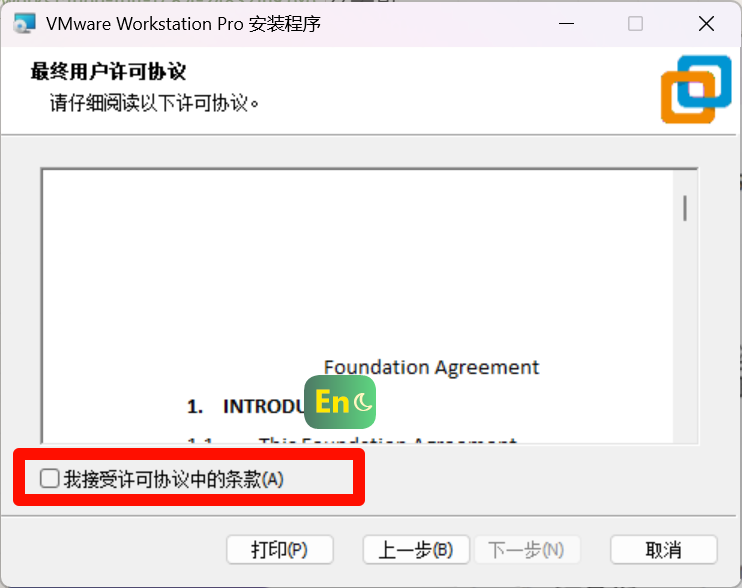
勾选后选择下一步
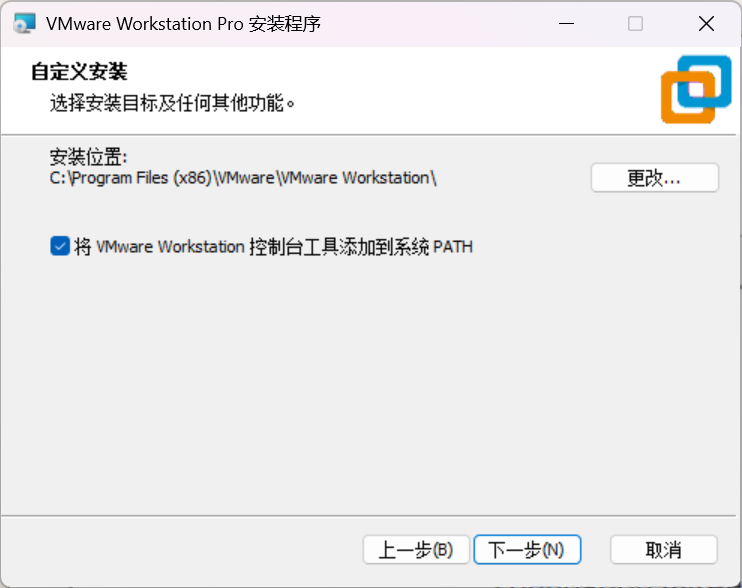
保持默认,下一步
取消勾选,下一步
保持默认,下一步
开始安装
安装完成
创建虚拟机-Ubuntu
打开VMware Workstation
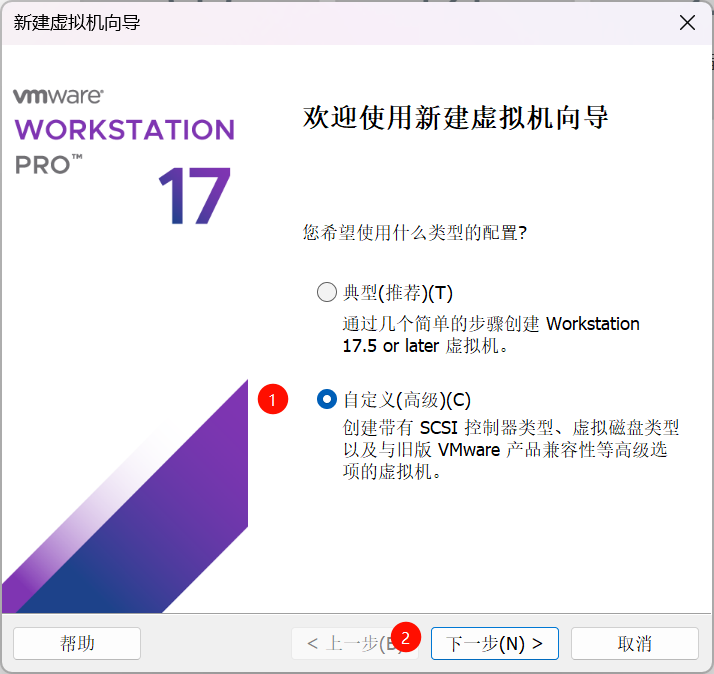
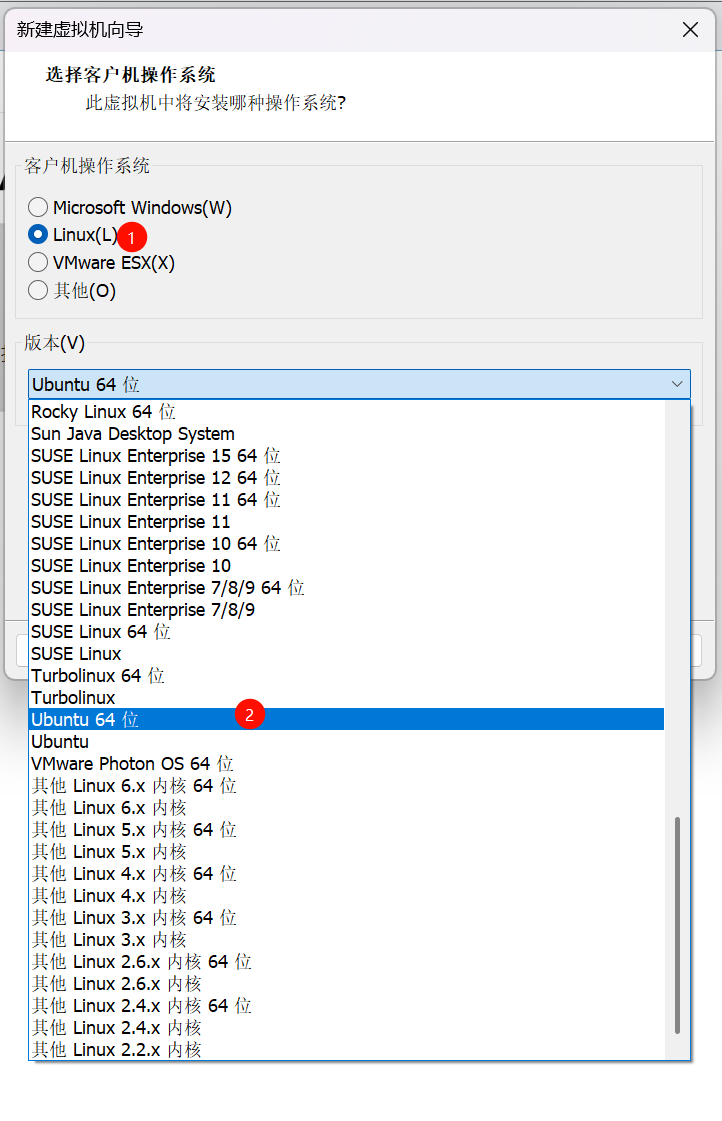
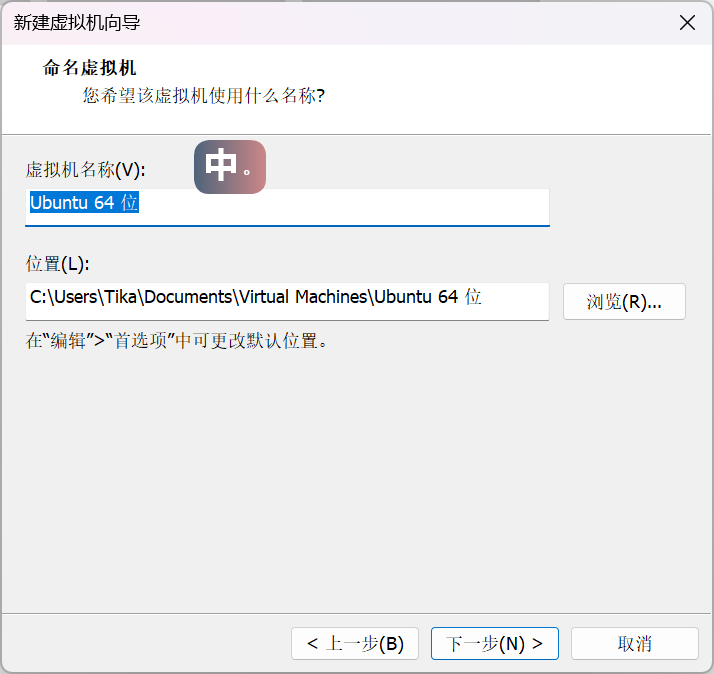
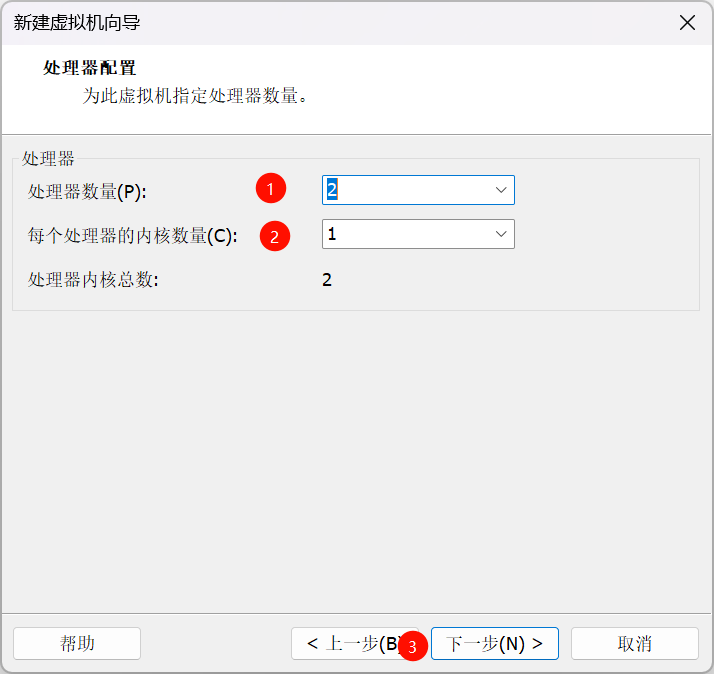
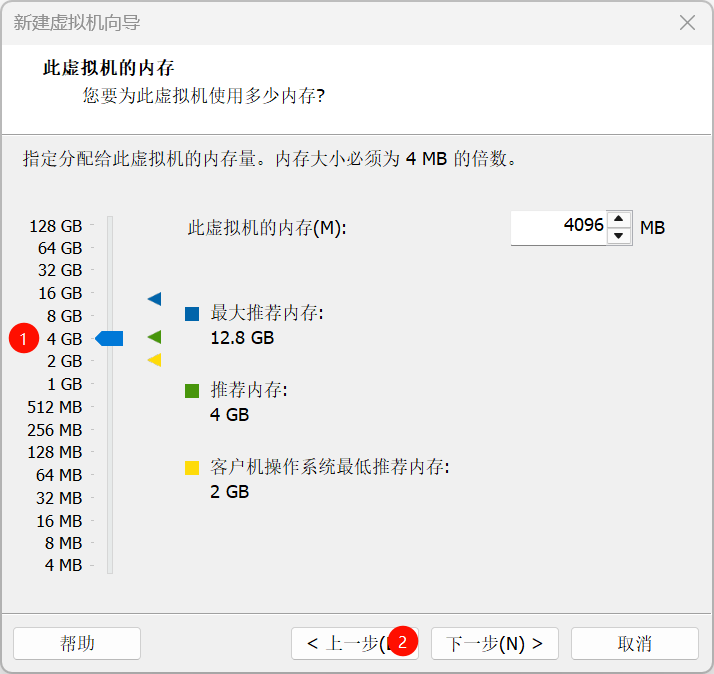
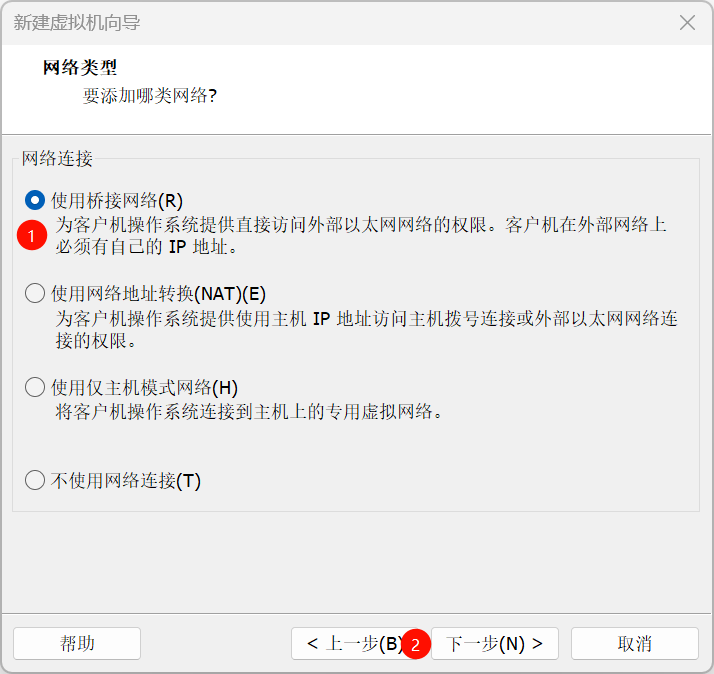
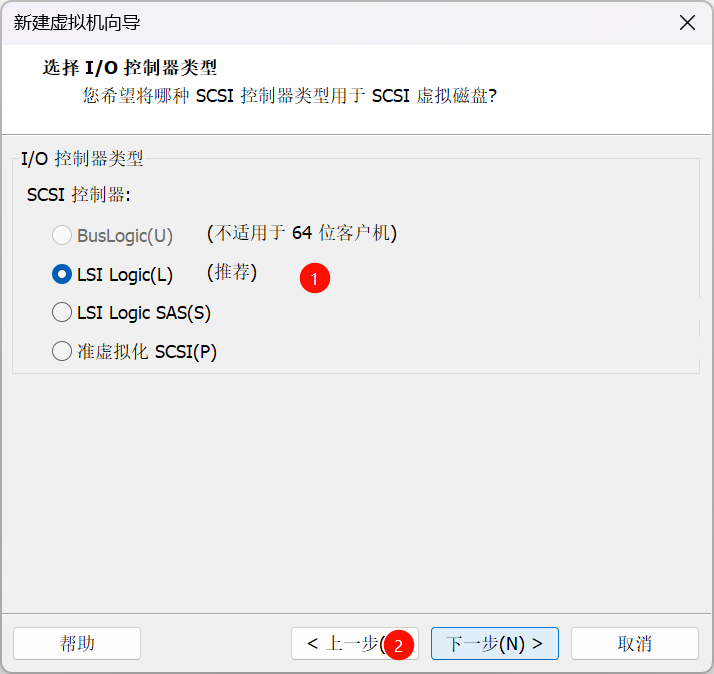
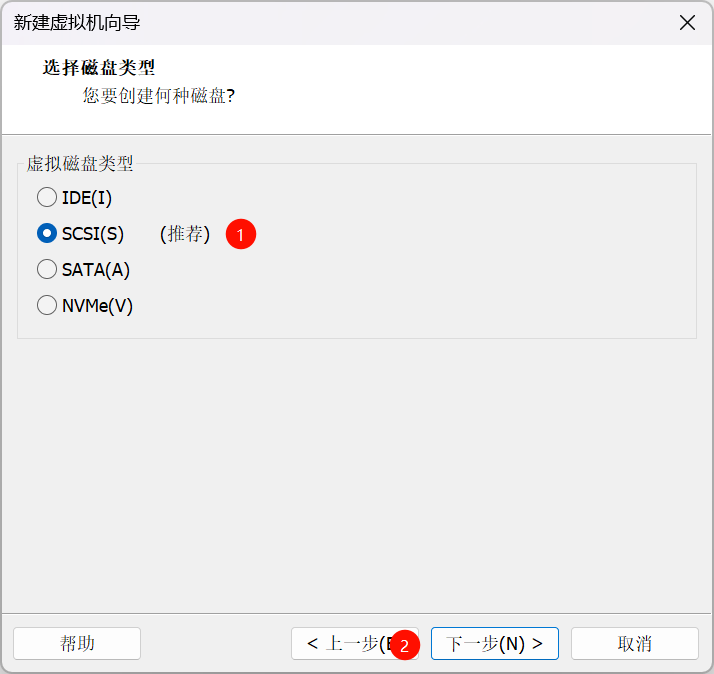
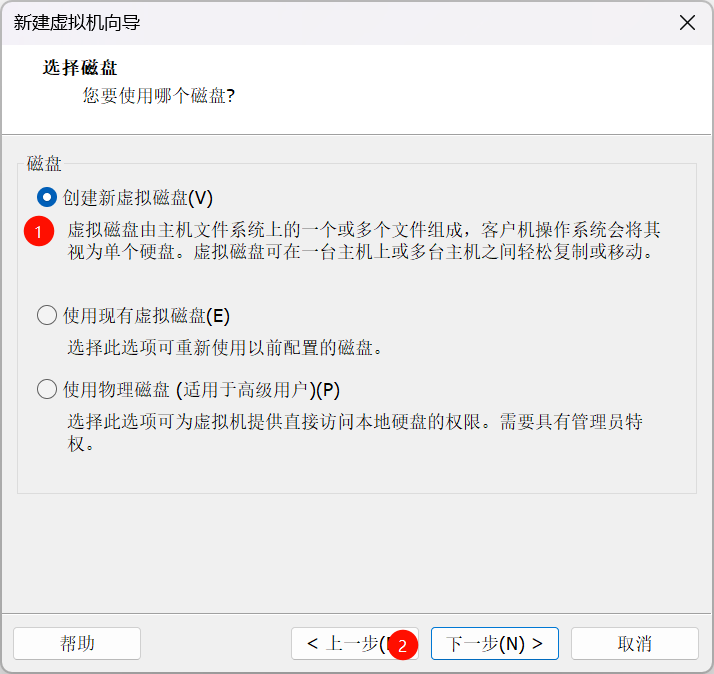
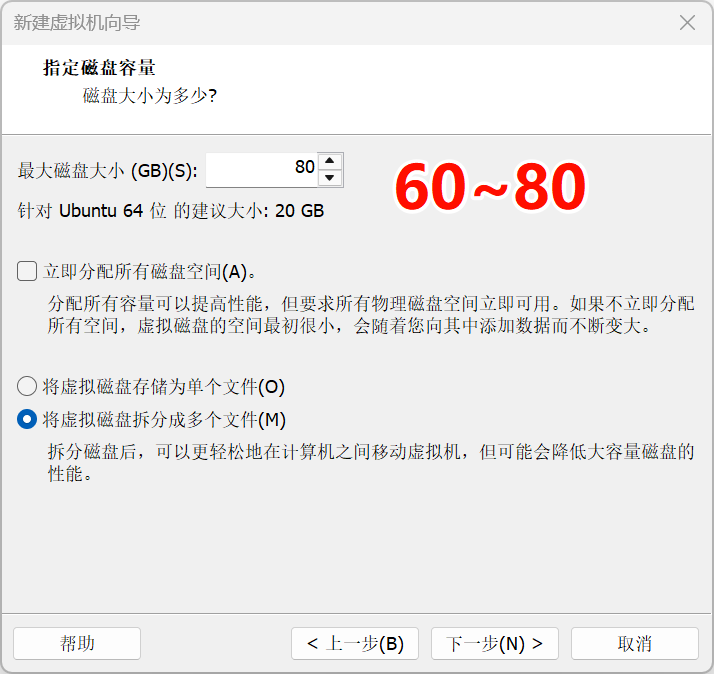
点击 创建新的虚拟机 ,在打开的新窗口中按照如下配置


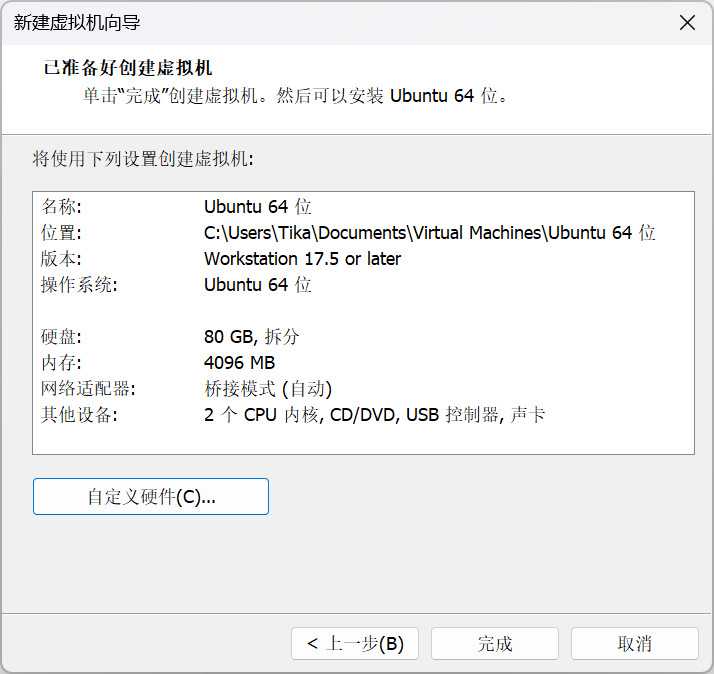
此时虚拟机部分创建完毕
配置虚拟机系统
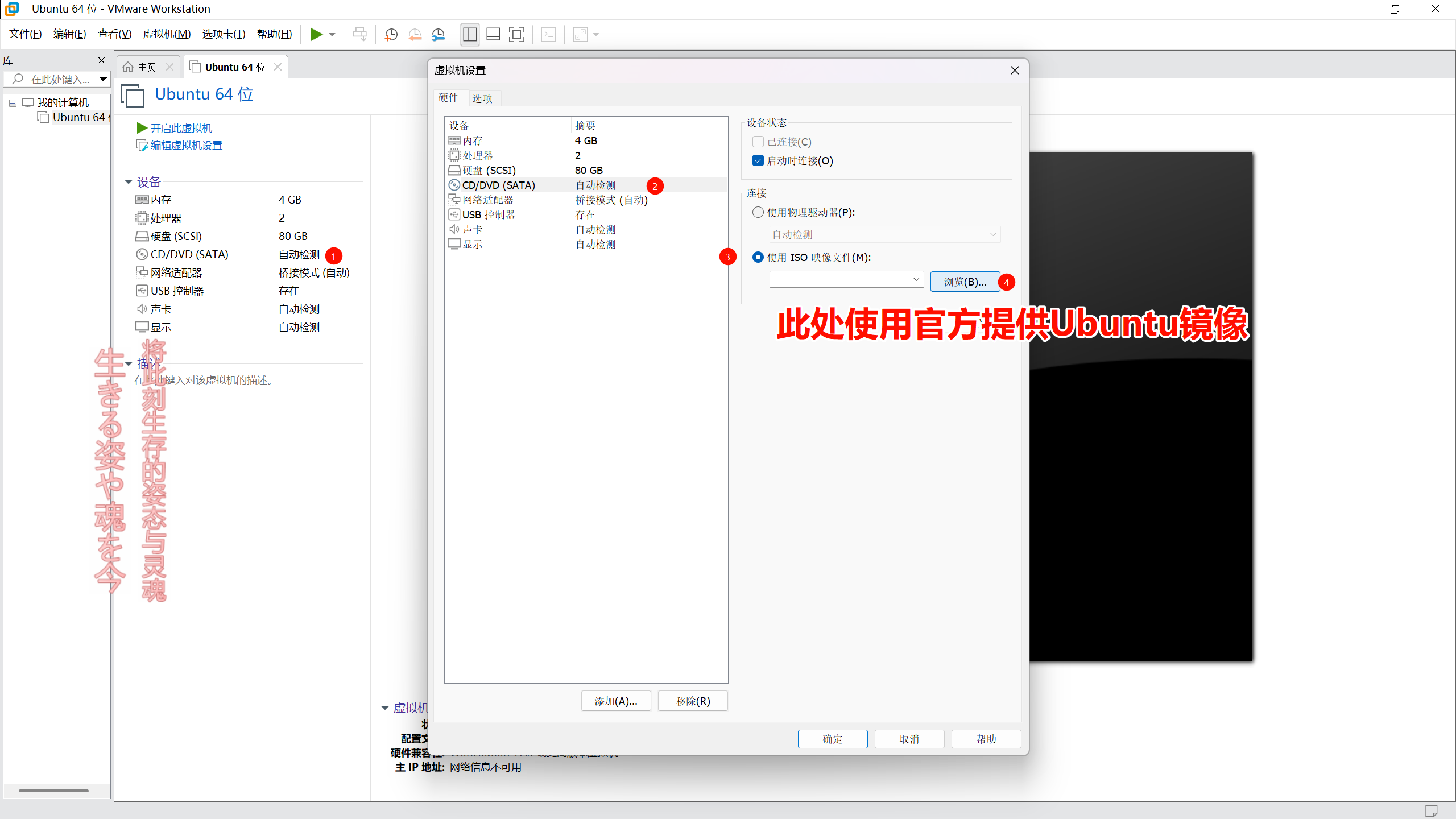
虚拟机系统设置
基本设置
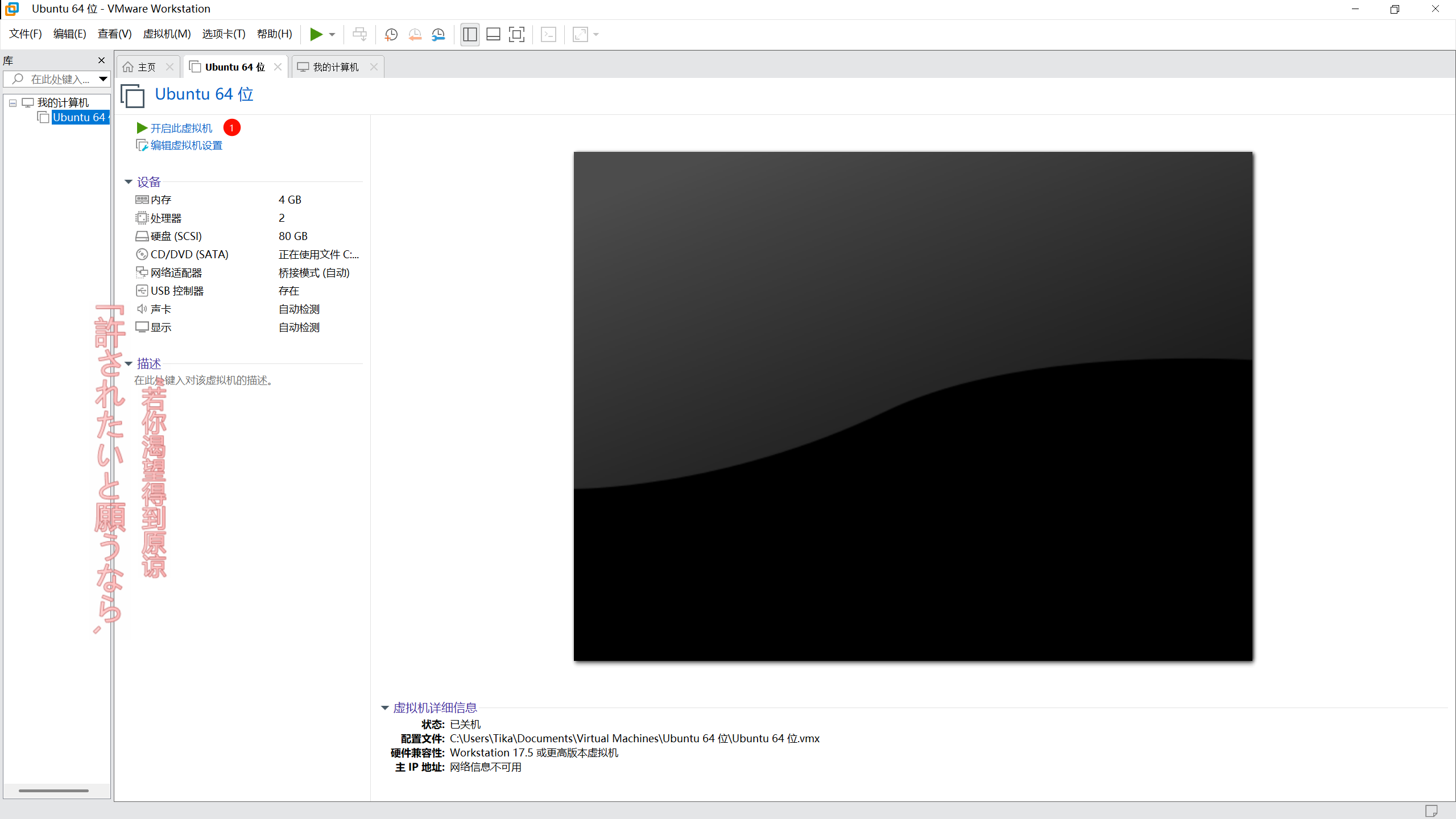
启动虚拟机
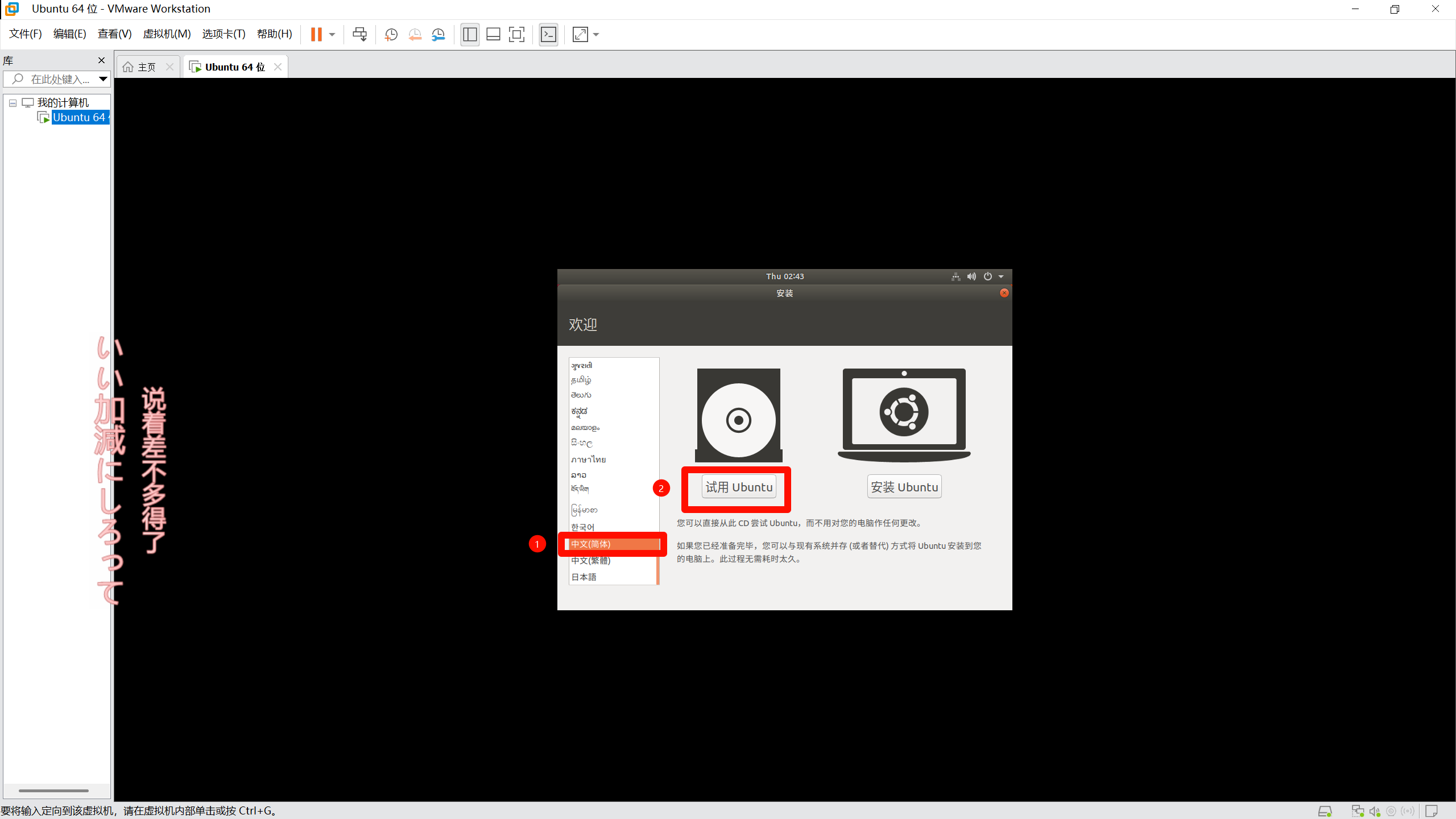
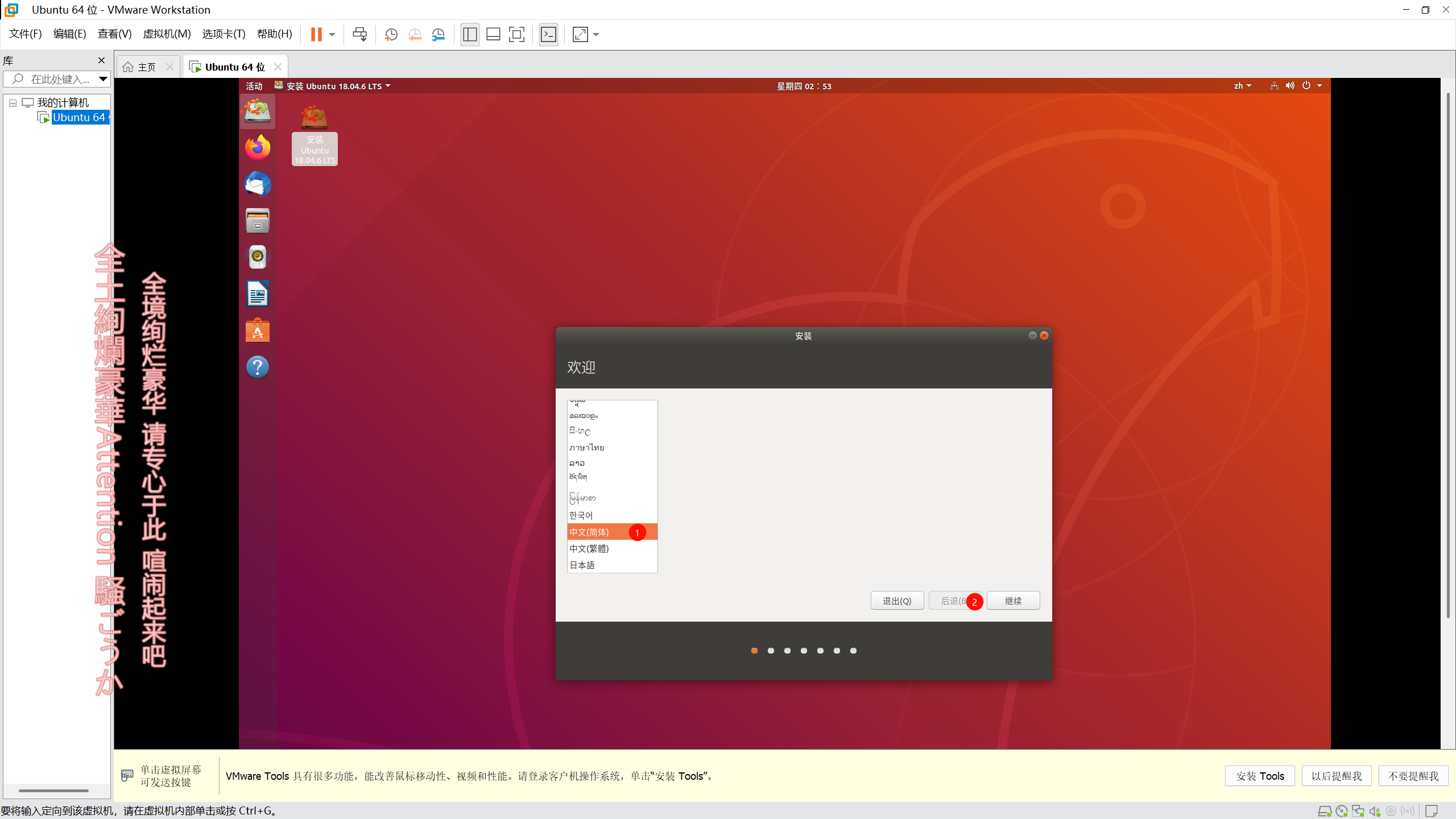
等待加载至如下界面,下翻找到 简体中文 ,点击后选择 试用
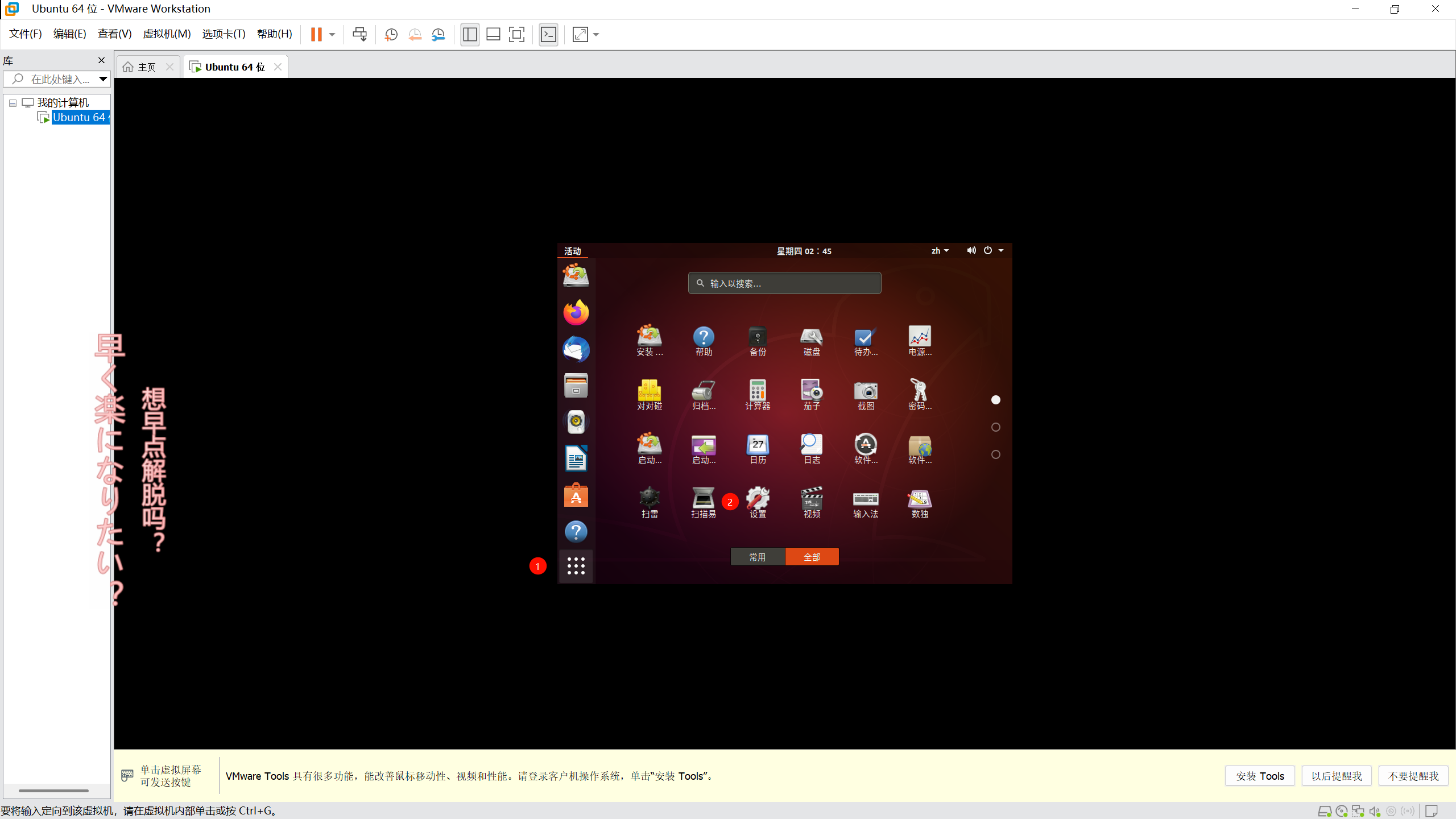
打开设置
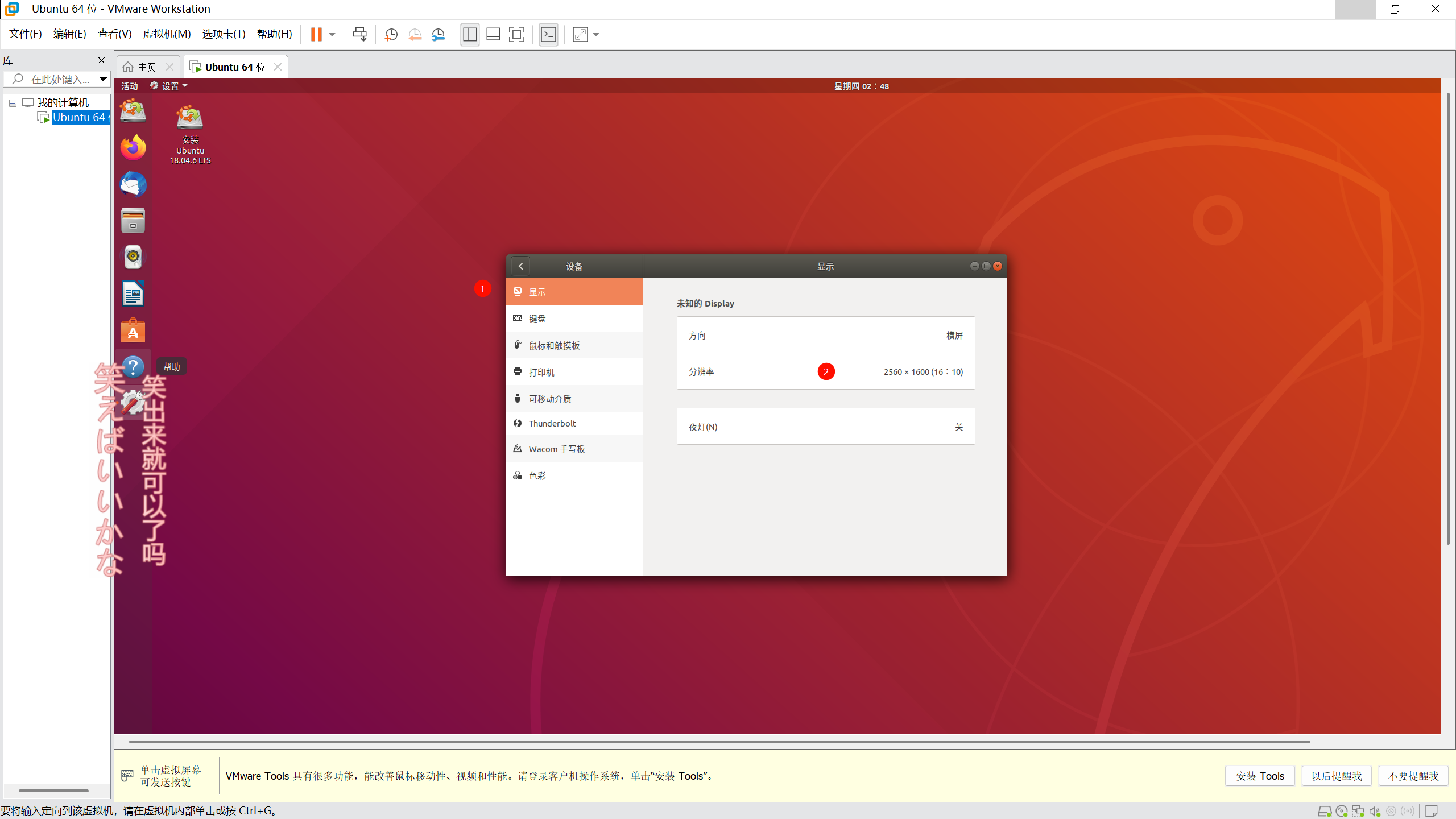
下翻找到设备,调整设备分辨率以适合窗口
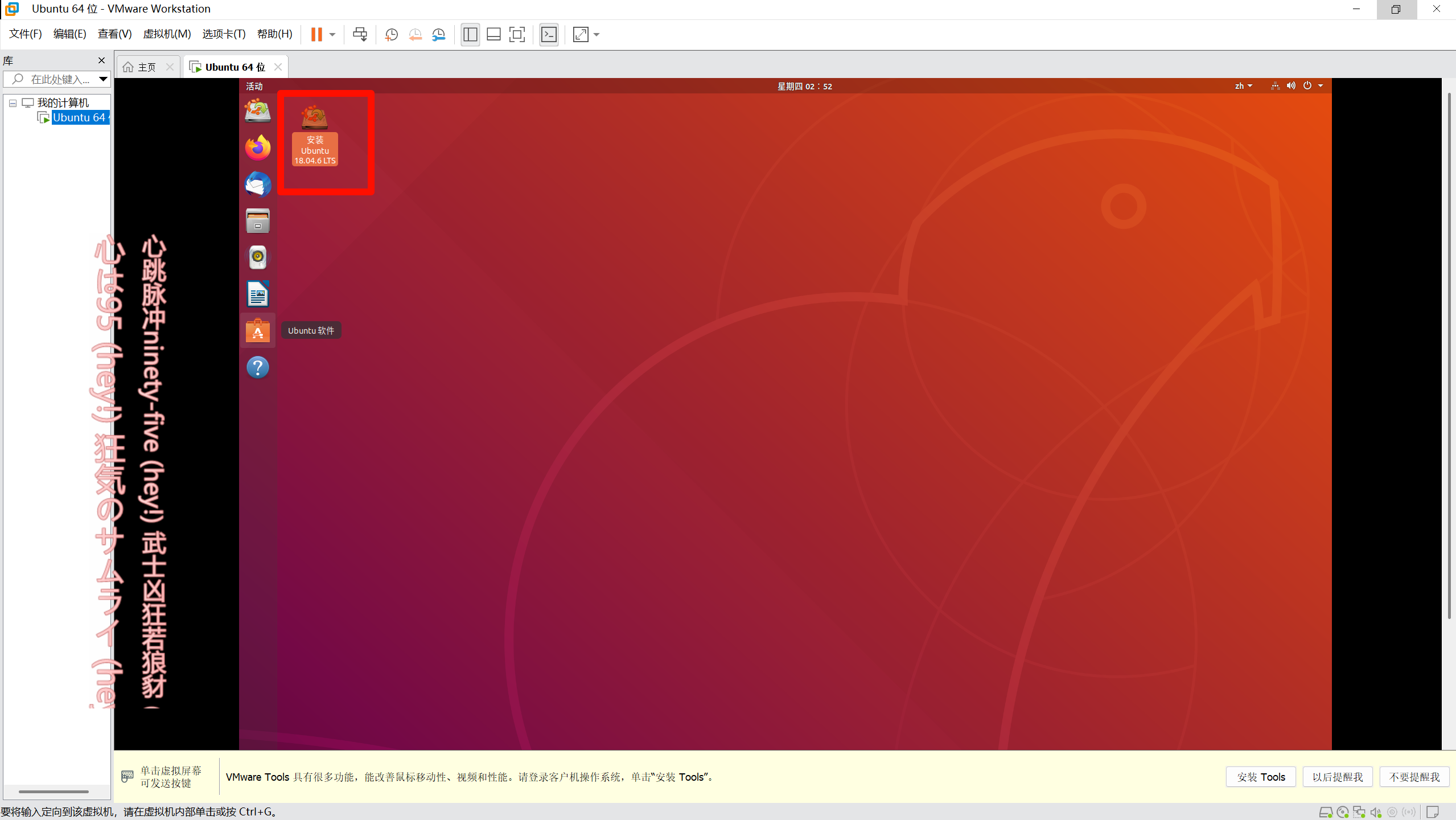
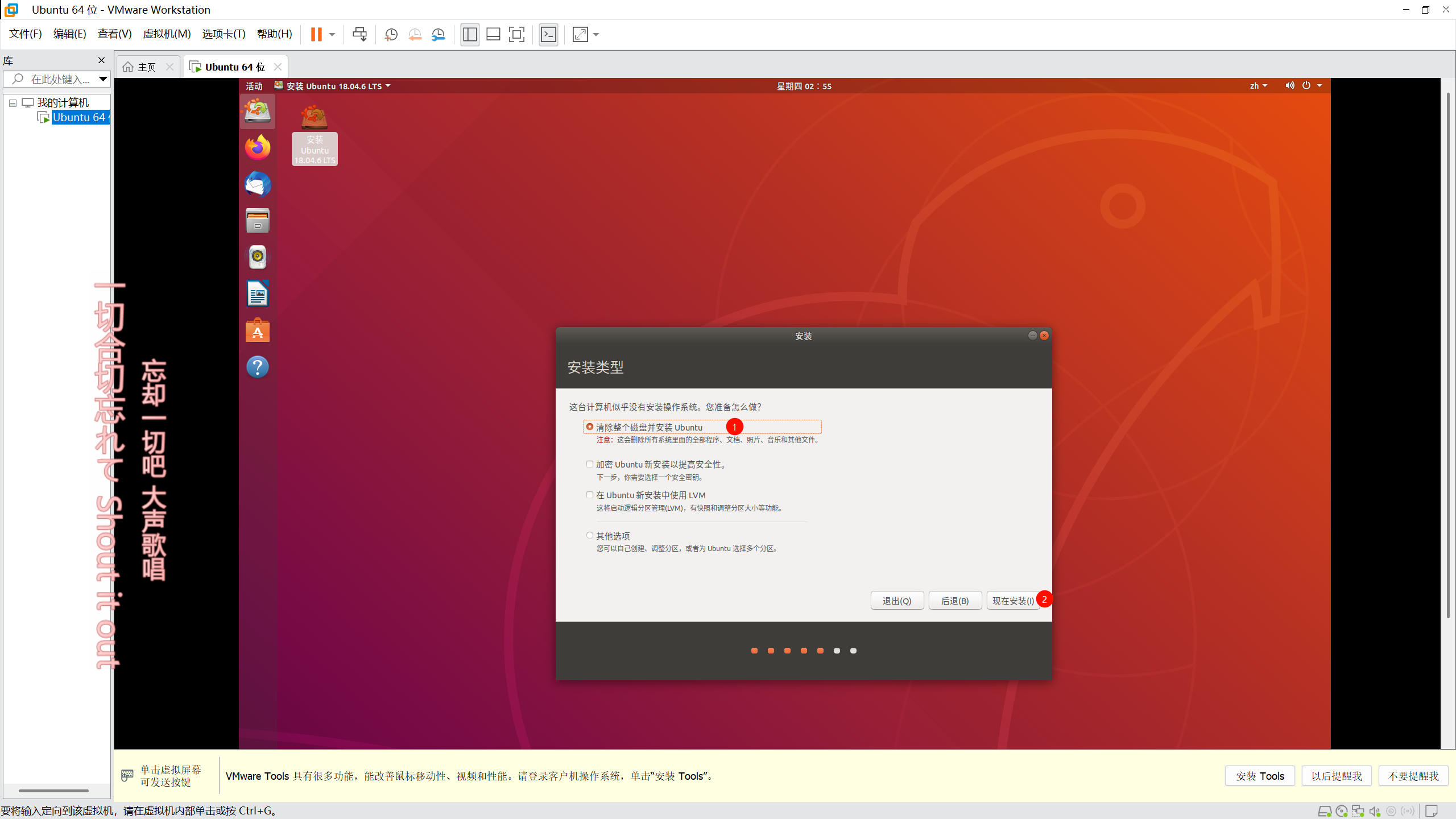
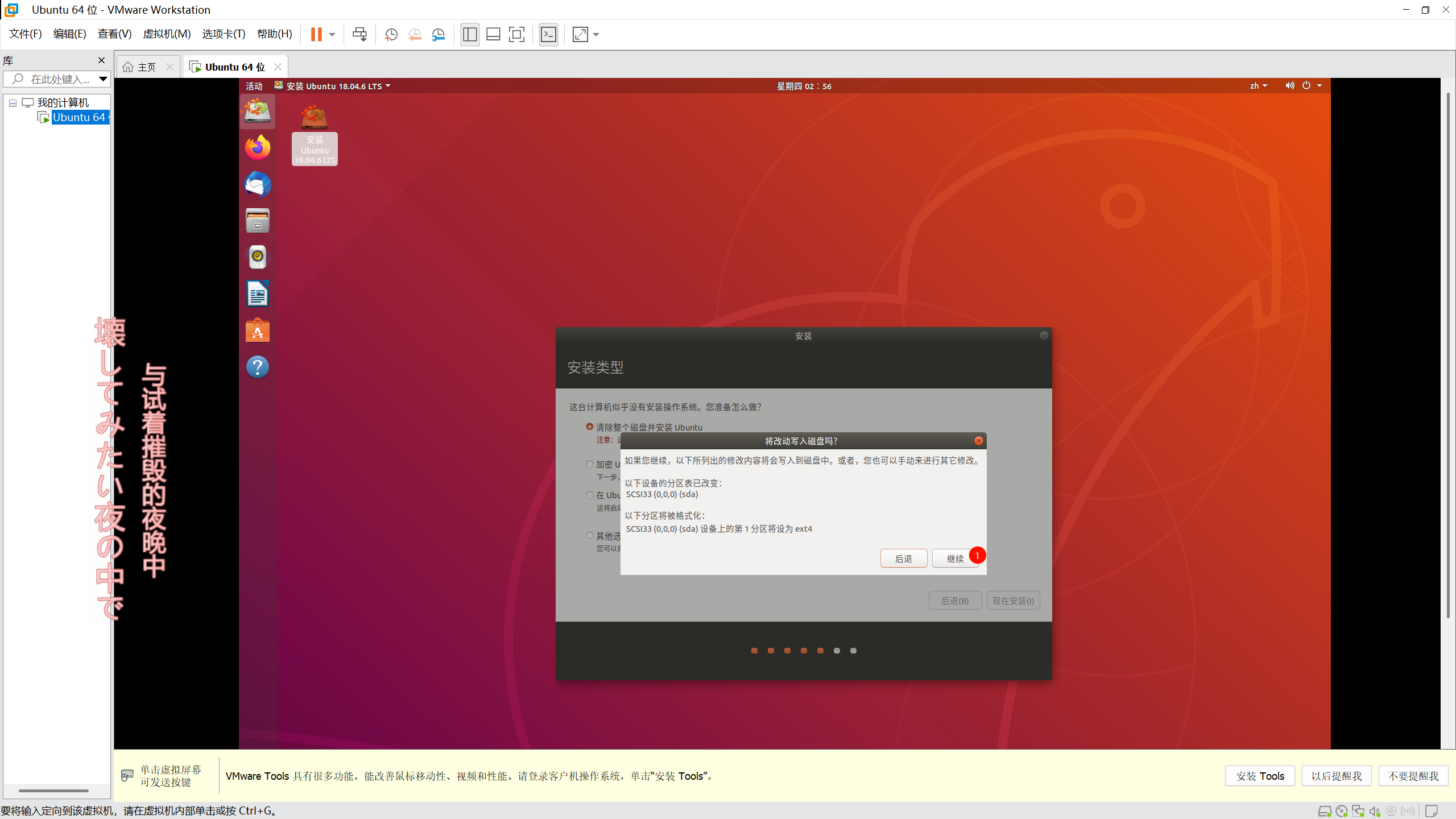
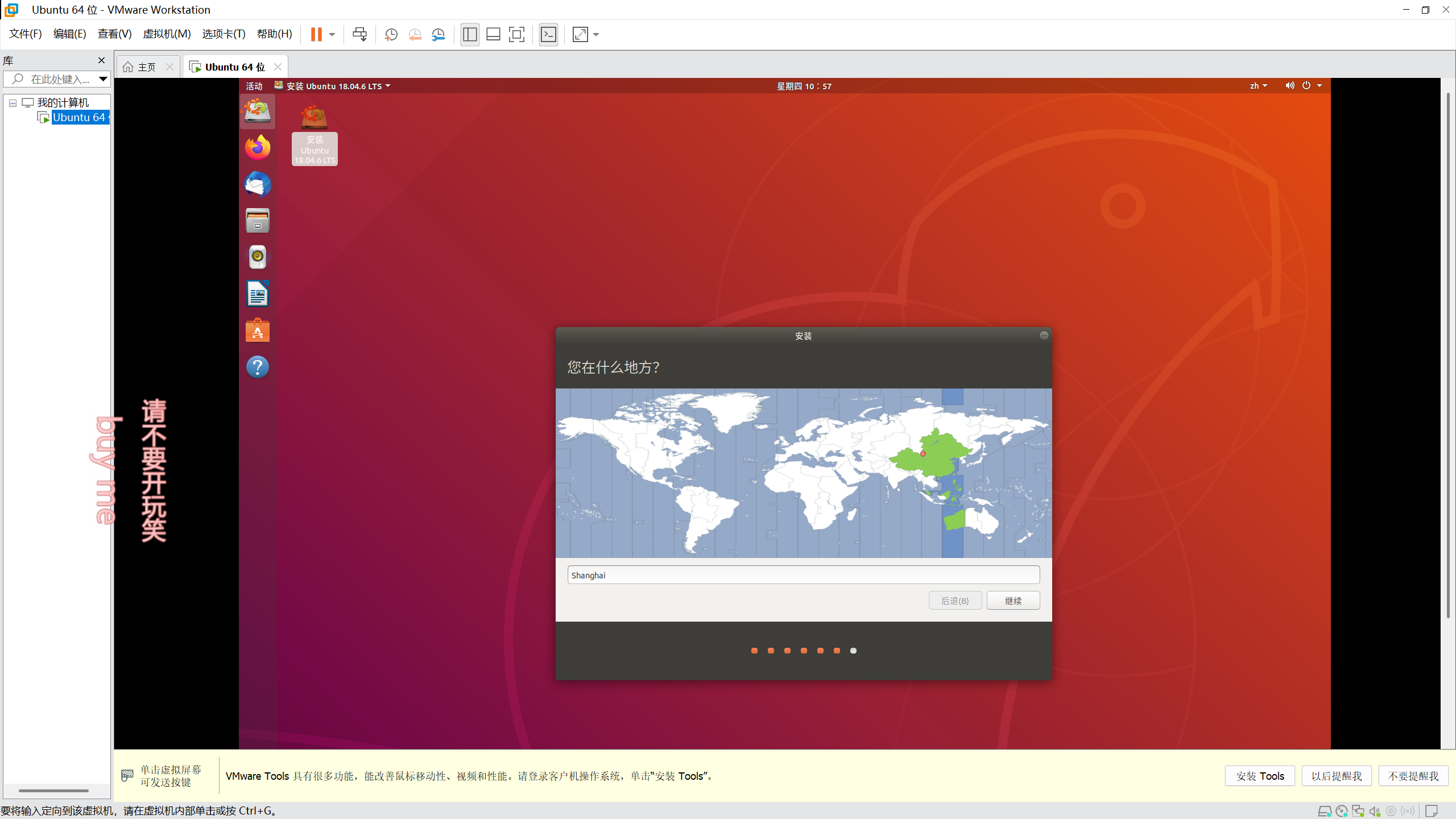
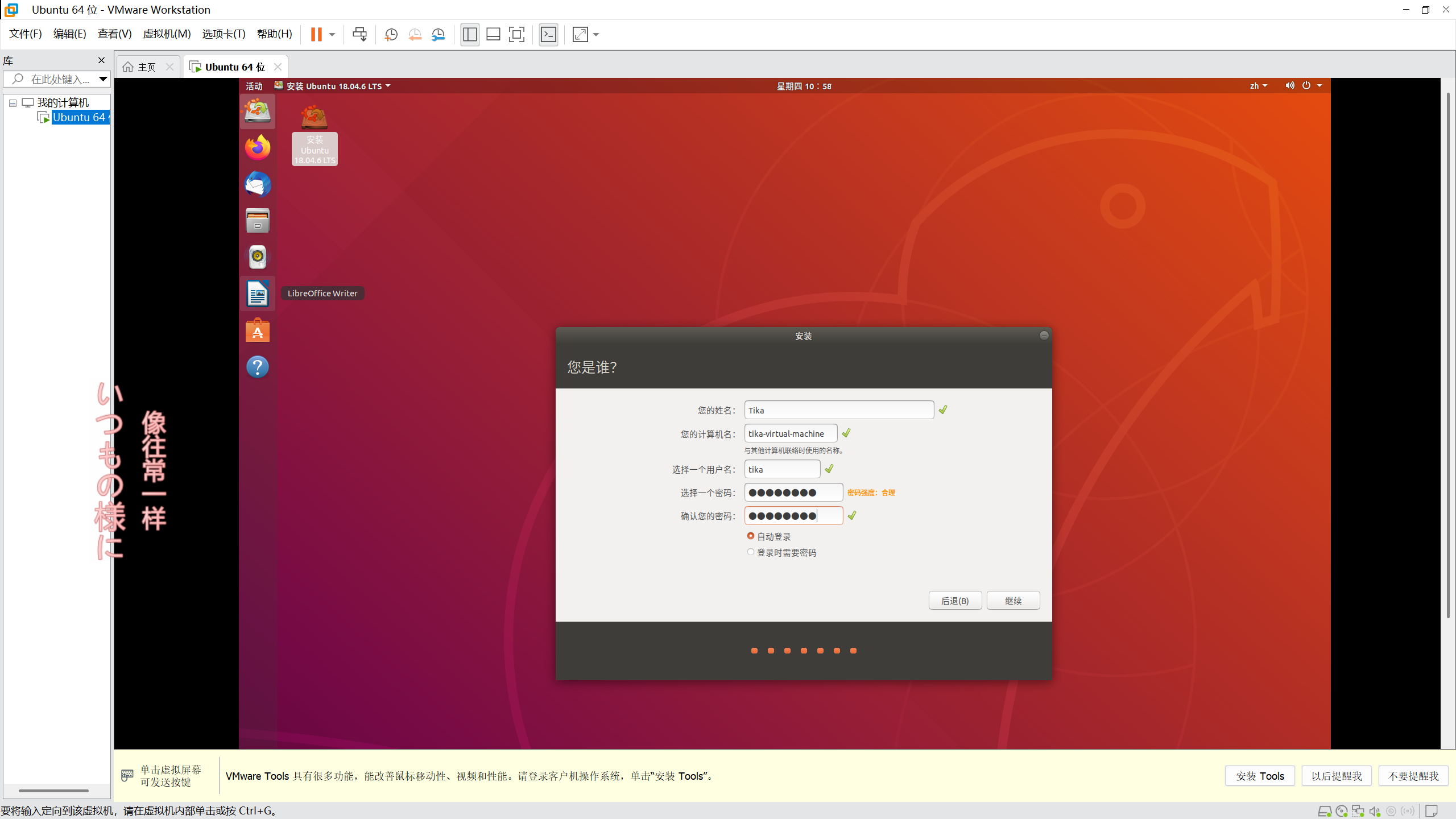
双击桌面上的安装Ubuntu
重启后重新修改一遍分辨率,步骤同上
创建模板
然后随便复制一个文本文件到模板文件夹下,改一下你熟悉的名字
安装VM-TOOLS
打开终端,使用如下命令
1 | sudo apt install open-vm-tools-desktop -y |
得到如下即可
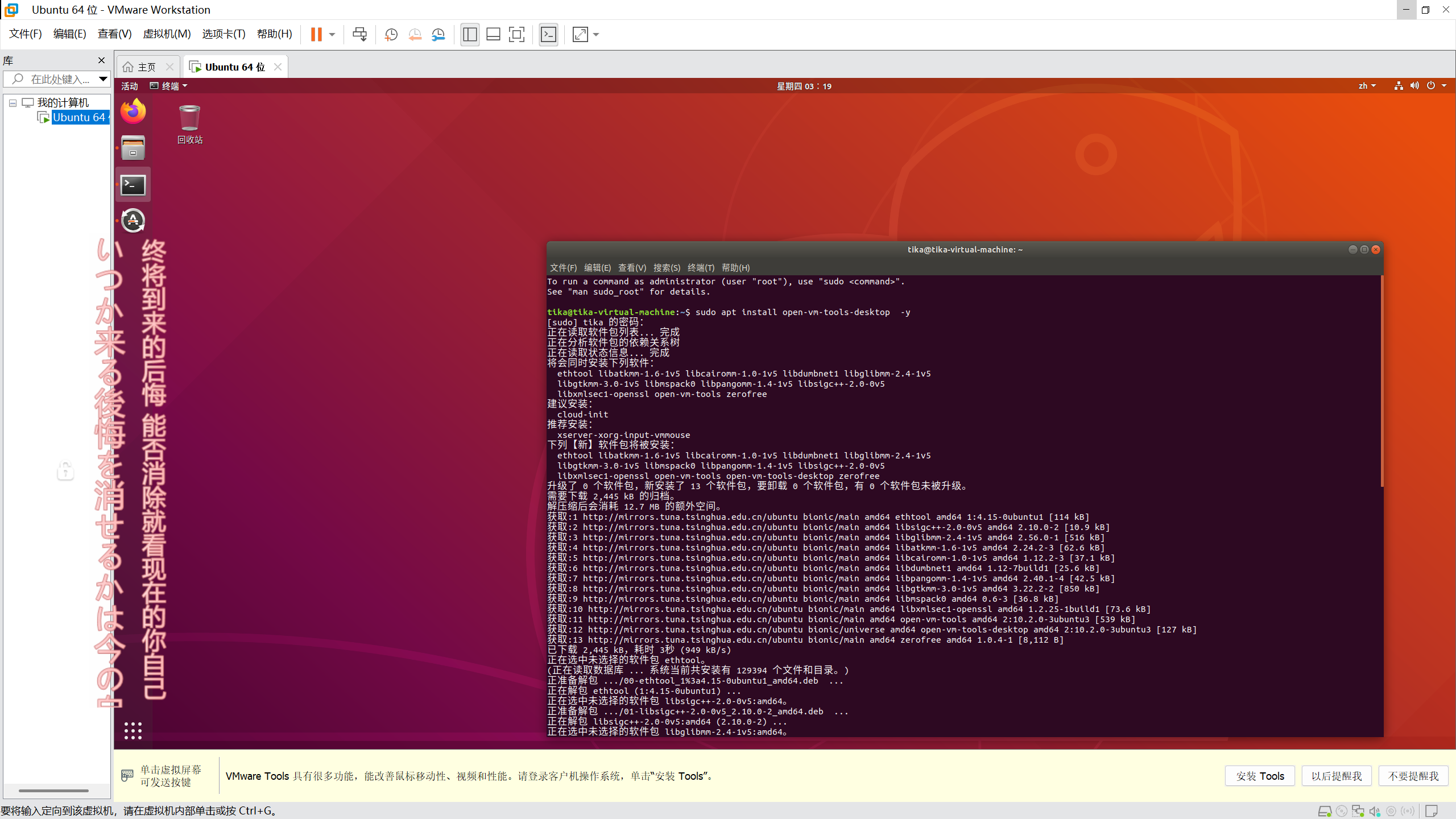
输入密码时,需要注意的是,此时终端并不会显示你的密码,所以,你直接输入后回车即可,安装完成之后重启虚拟机
安装ROS
终端中使用如下命令以一键安装(使用鱼香ROS)
1 | wget http://fishros.com/install -O fishros && . fishros |
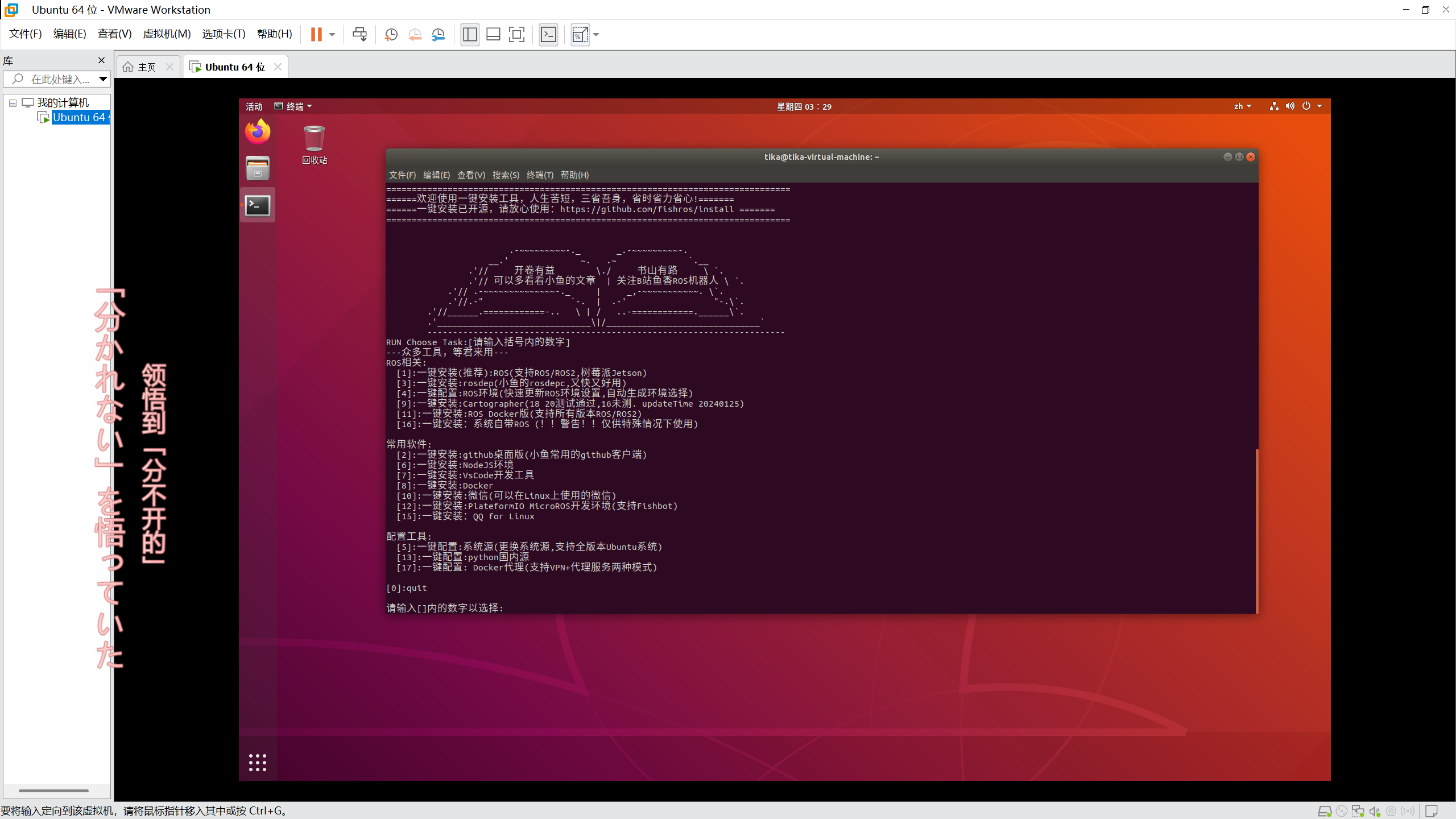
如上便是安装完成
然后选择 一键安装(推荐):ROS(支持ROS/ROS2,树莓派Jetson)
接下来出现如下内容,按照我的选择即可(即安装melodic(ROS1)和melodic(ROS1)桌面版)
1 |
|
报错
在此安装鱼香ROS时下可能会有报错,即无法连接到网络,如果无法连接到网络,这边建议更换网络模式,如下
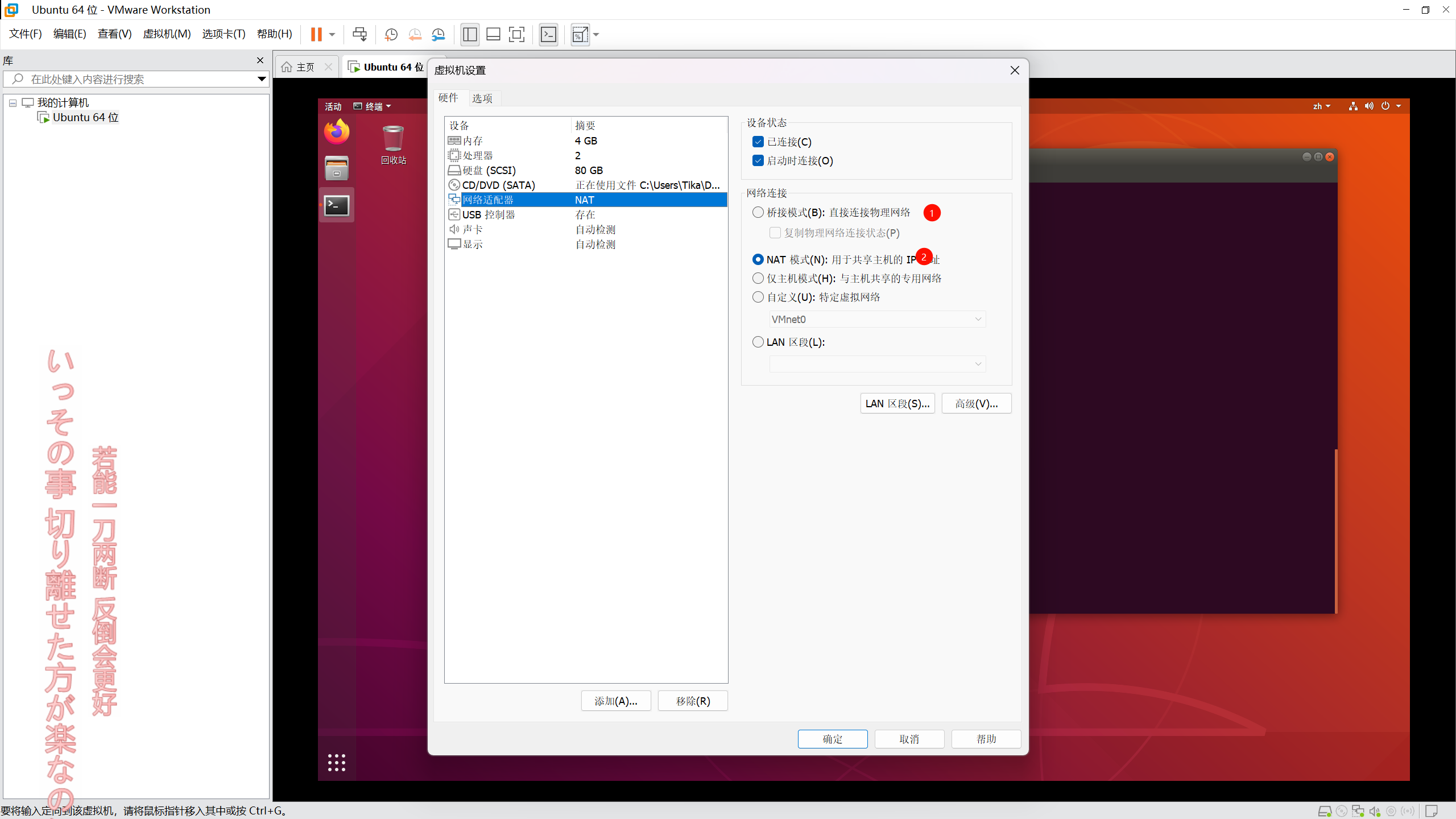
如果更换后问题依旧,这边建议Bing或者找我
- 标题: ROS实践系列01-基础环境配置
- 作者: 亓翎_Re-Tikara
- 创建于 : 2026-03-15 18:21:30
- 更新于 : 2026-03-15 20:23:04
- 链接: https://re-tikara.fun/Blog/posts/aee7723c/
- 版权声明: 本文章采用 CC BY-NC-SA 4.0 进行许可。