
ROS实践系列02-工作空间以及功能包

工作空间
工作空间(WorkSpace)是一个 文件夹结构 ,用于 组织、构建和管理 ROS 项目中的软件包 。每个工作空间可以包含多个独立的包(packages),这些包之间可以相互依赖。它是 ROS 开发的基础环境,类似于其他编程语言中的“项目目录”。而在本次比赛中,我们将使用 Catkin 工作空间 (基于 CMake 构建系统)。具体项目结构可以参考下图:
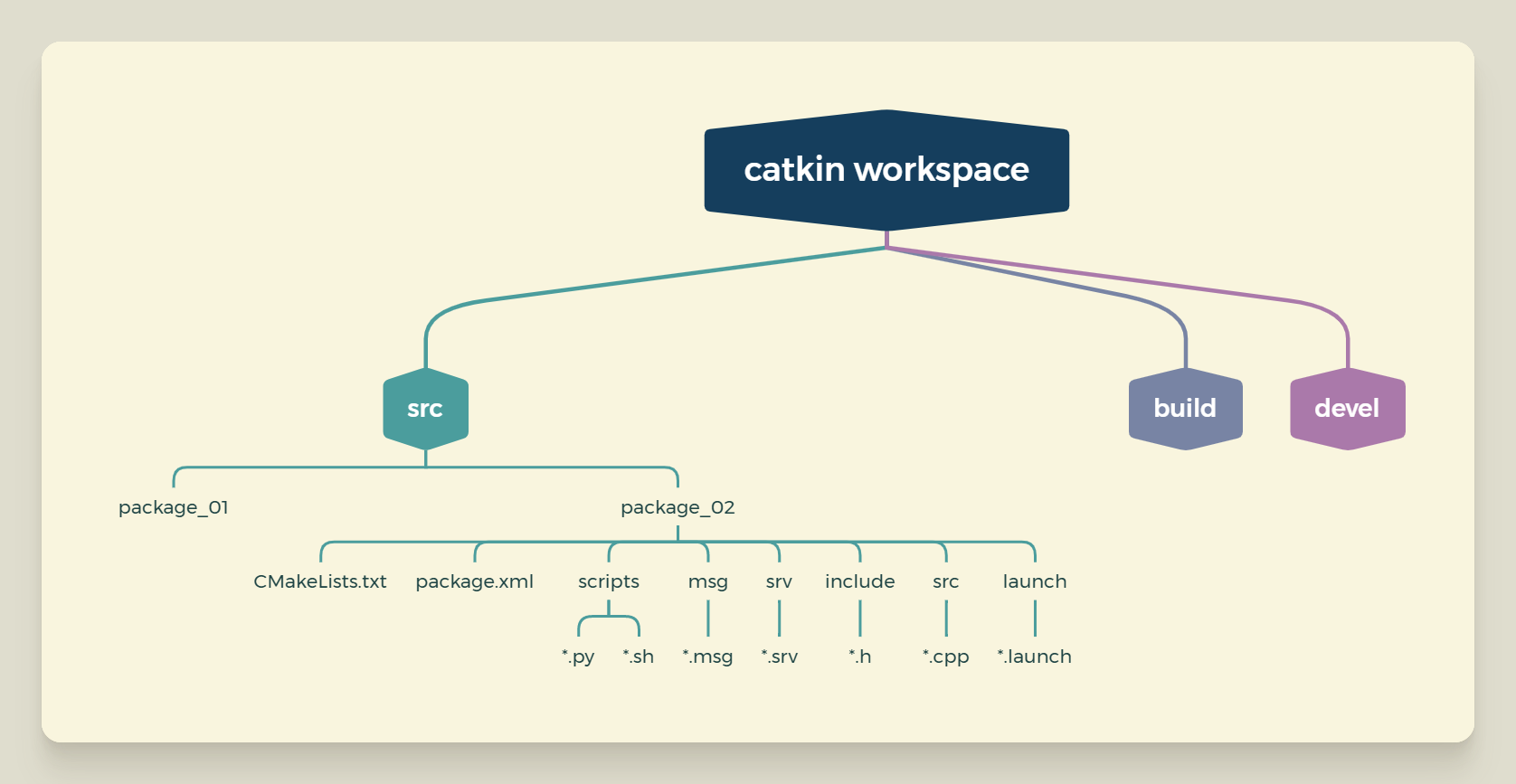
注: build/ 和 devel/ 目录是在你首次运行 catkin_make 或 catkin build 命令后自动生成的,不需要手动创建。
优势
- 标准化 :让所有开发者遵循统一的项目结构。
- 模块化 :每个包独立,便于复用和管理。
- 依赖管理 :通过
package.xml管理包之间的依赖关系。- 构建自动化 :使用
CMakeLists.txt和 Catkin 工具链自动编译代码。
工作空间常见文件与文件夹及其作用
工作空间根目录下的三个核心文件夹
src/ —— 源码目录
- 作用 :存放所有 ROS 包(packages)的源代码。
- 内容 :
- 所有你自己创建或从别人那里克隆来的 ROS 包都放在这里。
- 包含
CMakeLists.txt、package.xml等配置文件。 - 也包含
.cpp、.py、.msg、.launch等实际代码文件。
注意 :不要手动修改 build/ 和 devel/ ,它们是构建过程自动生成的。
build/ —— 构建中间文件目录
- 作用 :存放编译过程中生成的中间文件(如 Makefile、对象文件等)。
- 特点 :
- 由
catkin_make或catkin build自动生成。 - 不需要你手动编辑或管理。
- 可以安全删除后重新构建。
- 由
devel/ —— 开发环境输出目录
作用 :存放编译后的可执行文件、库文件、脚本以及环境设置文件。
关键文件 :
setup.bash/setup.sh/setup.zsh—— 设置当前终端环境变量(如ROS_PACKAGE_PATH,PYTHONPATH),让系统能找到你刚编译的包。
重要命令 :
1 | source devel/setup.bash |
这条命令必须在每次打开新终端后运行,才能使用你编译的包。
每个 ROS 包(如 package2 )内部的常见结构
CMakeLists.txt
- 作用 :CMake 构建系统的配置文件,告诉编译器如何编译你的代码。
- 内容包括 :
- 项目名称、版本
- 需要的依赖库(如
roscpp,rospy) - 编译哪些源文件(
.cpp) - 生成哪些可执行文件或库
类似于 Python 的 setup.py 或 C++ 项目的 Makefile 。
package.xml
- 作用 :包的元数据描述文件,定义包的基本信息和依赖关系。
- 内容包括 :
- 包名、版本、作者、许可证
- 运行时依赖(
<run_depend>) - 编译时依赖(
<build_depend>) - 导出信息(如插件、消息类型等)
✅ 必须存在 ,否则 ROS 无法识别这个包。
类似于 Python 的 requirements.txt + setup.py 的结合体。
包内的功能子目录
scripts/
- 作用 :存放可直接运行的脚本文件(通常是 Python 或 Shell 脚本)。
- 文件扩展名 :
.py—— Python 脚本(常用).sh—— Shell 脚本(用于启动程序、设置环境等)
这些脚本可以直接在终端运行(需赋予执行权限):
1 | chmod +x scripts/my_script.py |
msg/
- 作用 :存放自定义的 消息(Message) 定义文件。
- 文件扩展名 :
.msg - 示例 :
1
2
3
4# MyMessage.msg
int32 id
string name
float64[] scores - 用于在不同节点之间传递结构化数据。不同的package之间可以通过msg及其文件来沟通,交换数据。每个package相互独立,又彼此沟通。
使用前需在 CMakeLists.txt 和 package.xml 中声明并生成代码。
srv/
- 作用 :存放自定义的 服务(Service) 定义文件。
- 文件扩展名 :
.srv - 结构 :分为请求(request)和响应(response)两部分。
- 示例 :
1
2
3
4
5# AddTwoInts.srv
int32 a
int32 b
---
int32 sum - 用于实现“请求-响应”式通信(如调用一个服务计算两个数之和)。
使用前同样需在 CMakeLists.txt 声明并生成代码。
include/
- 作用 :存放 C++ 头文件(
.h或.hpp)。 - 用途 :
- 声明类、函数、常量等供其他
.cpp文件引用。 - 通常与
src/目录配合使用。
- 声明类、函数、常量等供其他
- 在
CMakeLists.txt中通过include_directories()告诉编译器头文件位置。
src/(包内的 src)
- 作用 :存放 C++ 源代码文件(
.cpp)。 - 用途 :
- 实现节点的主要逻辑。
- 通常会包含
main()函数,作为可执行程序的入口。
必须在 CMakeLists.txt 中用 add_executable() 和 target_link_libraries() 注册才能编译。
launch/
作用 :存放 启动文件(Launch Files) ,用于一次性启动多个节点、设置参数、加载机器人模型等。
文件扩展名 :
.launch语言 :XML 格式。
示例 :
1
2
3
4<launch>
<node name="talker" pkg=" beginner_tutorials" type="talker.py"/>
<node name="listener" pkg="beginner_tutorials" type="listener.py"/>
</launch>
使用方式:
1 | roslaunch my_package my_launch_file.launch |
各文件/目录功能速查表
| 文件/目录 | 类型 | 功能说明 |
|---|---|---|
src/ |
目录 | 存放所有 ROS 包的源代码 |
build/ |
目录 | 编译中间文件,自动生成 |
devel/ |
目录 | 编译后输出,包含可执行文件和环境设置脚本 |
CMakeLists.txt |
文件 | CMake 构建配置,控制如何编译代码 |
package.xml |
文件 | 包的元数据,声明依赖、作者、版本等 |
scripts/ |
目录 | 存放可执行脚本(Python/Shell) |
msg/ |
目录 | 自定义消息定义(.msg) |
srv/ |
目录 | 自定义服务定义(.srv) |
include/ |
目录 | C++ 头文件(.h) |
src/ (包内) |
目录 | C++ 源代码文件(.cpp) |
launch/ |
目录 | 启动文件(.launch),用于批量启动节点 |
后记
- 所有这些文件和目录都是 约定俗成的标准结构 ,遵循它能让你的代码更容易被他人理解和复用。
- 初学者建议先从官方教程(如
ros_tutorials)开始,观察标准包的结构。 - 使用
catkin_create_pkg命令可以快速创建符合规范的新包:1
2cd ~/catkin_ws/src
catkin_create_pkg my_package rospy std_msgs geometry_msgs
创建一个工作空间
创建工程根目录
方法一:分层创建
首先在系统主文件夹或任意一个你可以全局运行代码的路径下,使用 mkdir 来创建工程根目录,此处我以主文件夹下创建为例,在主文件夹下运行以下命令:
1 | mkdir Tika_ws |
此时,主文件夹下便出现一个名为Tika_ws的文件夹,之后的工程都是基于这个文件夹为根目录,故称为工程根目录
接下来进入该文件夹
1 | cd Tika_ws |
进入之后我们创建存放ROS源代码的 src 文件夹
1 | mkdir src |
此时我们的工程根目录创建完毕
方法二:多层一次创建
首先在系统主文件夹或任意一个你可以全局运行代码的路径下,使用 mkdir 来创建工程根目录,此处我以主文件夹下创建为例,在主文件夹下运行以下命令:
1 | mkdir -p Tika_ws/src |
此时我们Tika_ws和src便可以一次创建
多层建设必须要加入 -p 参数
声明工作空间
命令
我们需要在工程根目录下src(Tika_ws/src)路径下运行以下命令以声明工作空间
1 | catkin_init_workspace |
工作原理
这个命令会:
- 在
src/目录下生成一个CMakeLists.txt文件 (实际上是一个指向 Catkin 系统 CMake 文件的符号链接)。 - 这个
CMakeLists.txt的作用是告诉 CMake:“这个目录下包含多个 ROS 包,请遍历所有子目录并构建它们”。
生成的
CMakeLists.txt内容类似于:
这样,当你回到工作空间根目录运行 catkin_make 时,CMake 就知道如何处理整个 src/ 目录下的包。
补充
从 ROS Kinetic(2016 年)之后的版本开始 , catkin_make 命令已经 内置了自动初始化功能 。也就是说:
只需要这样做即可:
2
3
cd ~/Tika_ws
catkin_make
catkin_make 会自动检测 src/ 是否为空,并在必要时自动完成 catkin_init_workspace 的工作(即生成顶层 CMakeLists.txt )。
这样做的前提是:ROS 版本是 Kinetic、Melodic 或 Noetic (ROS Hydro / Indigo(较老版本不适用);Kinetic 及以后可省略)
编译
命令
我们需要在项目更目录(Tika_ws)文件夹下运行如下命令:
1 | catkin_make |
作用
- 编译
src/目录下的所有 ROS 包; - 在
build/目录中生成编译中间文件; - 在
devel/目录中生成可执行文件和环境配置。
后续
使新构建的包生效 (每次打开新终端都需要):
1 | source devel/setup.bash |
常用选项
只编译某个特定包 :
1
catkin_make --pkg 包名
显示详细编译信息(调试用) :
1
catkin_make VERBOSE=1
使用多线程加速编译 (例如使用 4 个 CPU 核心):
1
catkin_make -j4
清理编译结果 (重新编译前可选):
1
catkin_make clean
首次创建工作空间
如果你是第一次创建 Catkin 工作空间:
1 | mkdir -p ~/Tika_ws/src |
建议 :将环境变量自动加载到终端中,避免每次手动 source :
1 | echo "source ~/Tika_ws/devel/setup.bash" >> ~/.bashrc |
常见问题排查
提示
catkin_make: command not found
说明 ROS 环境未正确配置。请先运行:1
2source /opt/ros/你的ROS版本/setup.bash
# 例如:source /opt/ros/noetic/setup.bash(Ubuntu 20.04 + ROS Noetic)编译报错(如缺少依赖)
可使用rosdep自动安装依赖:1
rosdep install --from-paths src --ignore-src -r -y
修改了 CMakeLists.txt 或 package.xml 后不生效
通常需要重新运行catkin_make,有时需先清理:1
2catkin_make clean
catkin_make
创建功能包
命令
在根目录源代码文件夹下(Tika_ws/src)文件夹下运行如下命令即可创建一个名为 name_pkg 的功能包,同时该包依赖为 msgs rospy roscpp
1 | catkin_create_pkg name_pkg std_msgs rospy roscpp |
参数解析
catkin_create_pkg
创建一个新的 catkin 功能包。name_pkg
你要新建的包的名字(包名必须是小写字母、数字和下划线,不能有大写字母)。std_msgsrospyroscpp
表示这个新包在package.xml和CMakeLists.txt里会声明对这些依赖的需求。std_msgs:标准消息类型包rospy:Python 版 ROS 客户端库roscpp:C++ 版 ROS 客户端库
运行流程
运行命令后,会在当前目录下生成一个名为 Name_pkg 的文件夹,里面包括:
CMakeLists.txt
编译配置文件,会自动写好依赖。package.xml
包的描述文件(包名、依赖、作者等)。src/文件夹
放源代码。include/文件夹
(如果需要)放头文件。
文件结构
运行之后的文件结构树大致如下,有package.xml与CMakeLists.txt才能表示创建成功
1 | name_pkg |
补充依赖
需要补充依赖的两个地方
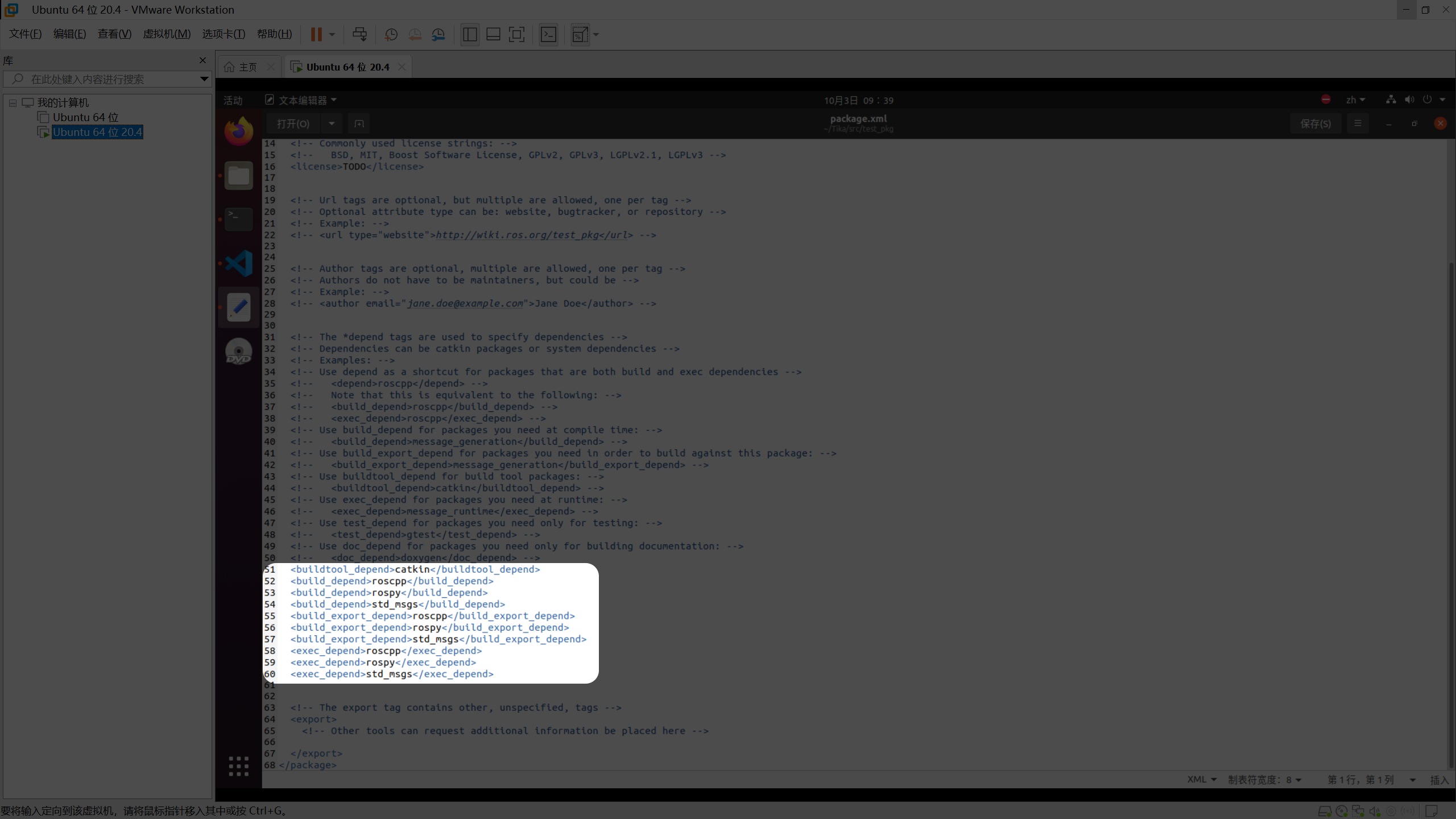
package.xml
这是 ROS 包的“说明书”,里面列出依赖。
找到 <depend> 标签位置,添加缺失的依赖,比如要加 sensor_msgs :
1 | <depend>sensor_msgs</depend> |
常见依赖写法:
1 | <depend>std_msgs</depend> |
CMakeLists.txt
这是编译配置文件。
找到 find_package(catkin REQUIRED COMPONENTS ...) 那一行,把依赖加进去:
1 | find_package(catkin REQUIRED COMPONENTS |
如果你需要用到消息依赖,还要在 catkin_package() 里加上:
1 | catkin_package( |
重新编译
修改完后,回到工作空间根目录:
1 | cd ~/Tika_ws |
编译成功后,别忘了刷新环境变量:
1 | source devel/setup.bash |
前后比对
package.xml
修改前
1 | <package format="2"> |
修改后(补充 sensor_msgs)
1 | <package format="2"> |
CMakeLists.txt
修改前
1 | cmake_minimum_required(VERSION 3.0.2) |
修改后(补充 sensor_msgs)
1 | cmake_minimum_required(VERSION 3.0.2) |
配置文件 .bashrc
.bashrc 的基本作用
- 位置:
~/.bashrc(~就是你的 home 目录) - 作用: 每次启动一个新的 bash 终端时 ,这个文件里的命令都会被执行。
- 常见用途:
- 设置环境变量(比如 PATH、ROS 环境)
- 定义别名(alias)
- 设置终端颜色/提示符
和 ROS 的关系
在 ROS 中,你安装或编译工作空间后,需要让系统知道 ROS 的路径。
通常会在 .bashrc 的最后加一句:
1 | source /opt/ros/noetic/setup.bash # ROS 主环境 |
这样,每次打开终端,ROS 的环境变量都会自动加载,不用你手动 source 一遍。
查看与编辑
- 查看:
1 | cat ~/.bashrc |
- 编辑:
1 | gedit ~/.bashrc |
或者用 nano:
1 | nano ~/.bashrc |
- 修改后生效:
1 | source ~/.bashrc |
ROS 工作空间和 .bashrc 的关系
1 | %%{init: {'theme':'handDrawn'}}%% |
launch文件
什么是 launch 文件?
- 后缀:
.launch - 格式: XML
- 功能:批量启动 ROS 节点、设置参数、加载配置
- 用途:
- 一次性启动多个节点
- 设置参数服务器的值
- 指定命名空间和重映射话题
- 更方便的实验和项目管理
相当于 一键启动脚本 。
基本结构
launch 文件放在功能包(package)的 launch/ 文件夹里。
一个最小例子:
1 | <launch> |
常用标签说明
<node>- 启动一个节点
- 参数:
pkg:功能包名字type:节点可执行文件名name:节点运行时的名字output="screen":日志打印到终端
示例:
1
<node pkg="my_robot" type="move_base" name="move_base_node" output="screen"/>
<param>- 设置参数服务器里的参数
1
<param name="robot_speed" value="1.0" type="double"/>
<rosparam>- 从 YAML 文件加载参数
1
<rosparam file="$(find my_robot)/config/robot.yaml" command="load"/>
<arg>- 定义变量,可以在运行
roslaunch时传入
1
2<arg name="use_sim_time" default="true"/>
<param name="use_sim_time" value="$(arg use_sim_time)"/>- 定义变量,可以在运行
<include>- 包含另一个 launch 文件
1
<include file="$(find my_robot)/launch/sensors.launch"/>
<group>- 分组并设置命名空间
1
2
3<group ns="robot1">
<node pkg="my_robot" type="controller" name="controller1"/>
</group>
示例
代码示例
创建一个 launch/ 文件夹(如果没有的话):
1 | cd ~/Tika_ws/src/my_robot # 假设你的包叫 my_robot |
在里面新建 turtle_demo.launch :
1 | <launch> |
说明
pkg="turtlesim"
表示节点来自turtlesim功能包(ROS自带)type="turtlesim_node"
小乌龟画图窗口节点type="turtle_teleop_key"
键盘控制节点launch-prefix="xterm -e"
强制在新终端打开键盘控制,不然你没法同时动键盘和看乌龟窗口。
如果你机器上没装 xterm ,先装一下:
1 | sudo apt-get install xterm |
启动方式
编译并运行:
1 | cd ~/lx_ws |
你会看到:
- 一个小乌龟窗口弹出来(乌龟在里面)
- 另一个终端窗口运行
turtle_teleop_key,你可以用键盘↑ ↓ ← →控制乌龟画图
- 标题: ROS实践系列02-工作空间以及功能包
- 作者: 亓翎_Re-Tikara
- 创建于 : 2026-03-15 18:25:13
- 更新于 : 2026-03-15 20:07:53
- 链接: https://re-tikara.fun/Blog/posts/bc930edf/
- 版权声明: 本文章采用 CC BY-NC-SA 4.0 进行许可。